硬件平台:FL2440
主机平台:Ubuntu 11.04
交叉编译器:arm-linux-gcc 4.3.2
原创作品,转载请标明出处http://blog.csdn.net/yming0221/article/details/6604616
本来是想移植最新的内核2.6.39但是总是在编译快完成的时候报错,有人说是新的内核对arm平台的支持不好,所以就降低了一下版本,这里移植2.6.35.4内核
一、准备工作
1、下载 解压内核
从官网上下载linux-2.6.35的内核, ftp://ftp.kernel.org/pub/linux/kernel/v2.6/ ,文件不大,约85M。
新建一个工作目录s3c2440,将内核源码包拷贝至工作目录下,再解压。
2、移植yaffs2驱动
下载最新的驱动点击下载 解压在工作目录s3c2440下
进入yaffs2: cd yaffs2
给内核打补丁: ./patch-ker.sh c ../linux-2.6.35
3、安装交叉编译环境
下载arm-linux-gcc 4.3.2,然后安装并配置环境变量
最后执行arm-linux-gcc -v查看
二、移植
1、修改机器码
飞凌开发板的bootloader默认的机器码是193,所以我们在使用smdk2440机器的时候,需要修
改机器码。修改内核2.6.35.3中的arch/arm /tools/mach-types。
删掉
s3c2410 ARCH_S3C2410 S3C2410 182
然后将
s3c2440 ARCH_S3C2440 S3C2440 362
修改为
s3c2440 ARCH_S3C2440 S3C2440 193
2、指定目标板machine、编译器和编译器路径
修改linux-2.6.35.3/Makefile,将
ARCH ?= $(SUBARCH)
CROSS_COMPILE ?=
修改成ARCH ?= arm
CROSS_COMPILE ?= /opt/arm/4.3.2/bin/arm-linux-
注意:CROSS_COMPILE是指交叉编译器的路径,该路径一定要完整,否则最后make zImage时提示文件不存在。
3、增加devfs文件管理器的支持
我们所用的文件系统使用的是devfs文件管理器。修改fs/Kconfig,
找到
menu "Pseudo filesystems"
添加如下语句:
config DEVFS_FS
bool "/dev file system support (OBSOLETE)"
default y
config DEVFS_MOUNT
bool "Automatically mount at boot"
default y
depends on DEVFS_FS
帮助理解:Kconfig就是对应着内核的配置菜单。假如要想添加新的驱动到内核的源码中,能够修改Kconfig,
这样就能够选择这个驱动,假如想使这个驱动被编译,要修改Makefile。
4、修改晶振频率(可解决打印信息乱码问题)
文件:arch/arm/mach-s3c2440/mach-smdk2440.c
/*s3c24xx_init_clocks(16934400);*/s3c24xx_init_clocks(12000000);
5、修改MTD分区
具体参考
http://blog.csdn.net/yming0221/article/details/6566551
6、关闭ECC校验
文件:drivers/mtd/nand/s3c2410.c
函数:s3c2410_nand_init_chip
/*chip->ecc.mode = NAND_ECC_SOFT; */chip->ecc.mode = NAND_ECC_NONE;
问题:关于ECC:ECC是“Error Correcting Code”的简写,中文名称是“错误检查和纠正”。ECC是一种能够实现
“错误检查和纠正”的技术,ECC内存就是应用了这种技术的内存,一般多应用在服务器及图形工作站上,这将使整个
电脑系统在工作时更趋于安全稳定。此处为避免容易出错,将ECC关闭。
7、修改nandflash驱动,支持K9F1G08的nandflash
修改drivers/mtd/nand下面的nand_bbt.c文件:
8、下面,开始配置内核。
进入linux-2.6.35目录,把s3c2410的默认配置写入config文件。
make s3c2410_defconfig
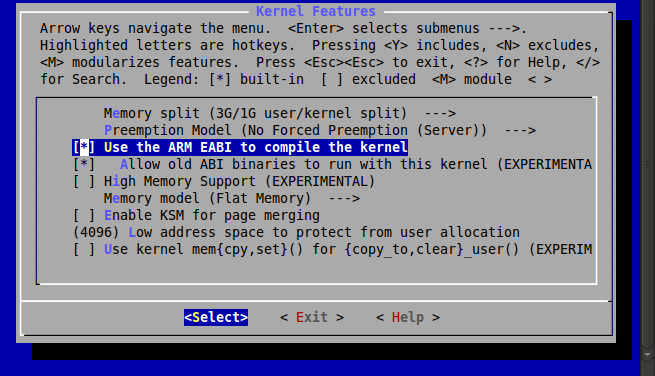
make menuconfig
配置内核特点使用ARM EABI编译
配置文件系统选项
配置yaffs2文件系统
修改配置如下:
File systems --->
[*] Miscellaneous filesystems --->
<*> YAFFS2 file system support
-*- 512 byte / page devices
-*- 2048 byte (or larger) / page devices
[*] Autoselect yaffs2 format
[*] Cache short names in RAM
配置cpu相关选项
修改配置如下:
System Type --->
S3C2440 Machines --->
[*] SMDK2440
[*] SMDK2440 with S3C2440 CPU module
去掉S3C2400 Machines、S3C2410 Machines、S3C2412 Machines、S3C2442 Machines的所有选项,
否则会报错。如果现在编译内核,下载到开发板中,内核就可以正常启动了.有了雏形,继续移植设备驱动。
这里,内核选项*代表编译至内核,M代表编译为模块。
9、移植USB host驱动
在这个版本的linux内核,已经对USB驱动进行来很好的支持,仅仅需要修改配置。
Device Drivers --->
[*] USB support --->
{*} Support for Host-side USB
[*] USB device filesystem (DEPRECATED)
[*] USB device class-devices (DEPRECATED)
<*> OHCI HCD support
<*> USB Mass Storage support
[*] HID Devices --->
{*} Generic HID support
[*] /dev/hidraw raw HID device support
SCSI device support --->
<*> SCSI device support
[*] legacy /proc/scsi/ support
<*> SCSI disk support
<*> SCSI tape support
10、移植RTC驱动
在这个版本的linux内核,已经对RTC驱动进行来很好的支持,不需要修改配置。相应配置如下
Device Drivers --->
<*> Real Time Clock --->
[*] Set system time from RTC on startup and resume
(rtc0) RTC used to set the system time
[ ] RTC debug support
*** RTC interfaces ***
[*] /sys/class/rtc/rtcN (sysfs)
[*] /proc/driver/rtc (procfs for rtc0)
[*] /dev/rtcN (character devices)
<*> Samsung S3C series SoC RTC
然后添加对设备的支持
打开arch/arm/mach-s3c2440/mach-smdk2440.c,添加设备,代码如下:
11、移植UDA1341驱动
在平台上添加和配置UDA1341:
修改arch/arm/mach-s3c2440/mach-smdk2440.c,在开始添加头文件
#include <sound/s3c24xx_uda134x.h>
#include <mach/gpio-fns.h>
把设备添加到平台当中
内核配置如下
Device Drivers --->
<*> Sound card support --->
<*> Advanced Linux Sound Architecture --->
<*> OSS Mixer API
<*> OSS PCM (digital audio) API
[*] OSS PCM (digital audio) API - Include plugin system
[*] Support old ALSA API
[*] Verbose procfs contents
[*] Verbose printk
[*] Generic sound devices --->
<*> ALSA for SoC audio support --->
<*> SoC Audio for the Samsung S3C24XX chips
<*> SoC I2S Audio support UDA134X wired to a S3C24XX
12、移植DM9000驱动
a、修改drivers/net/dm9000.c文件:
头文件增加:
#include <mach/regs-gpio.h>
#include <mach/irqs.h>
#include <mach/hardware.h>
在dm9000_probe函数开始增加:
在这个函数的最后需要修改:
b、修改arch/arm/mach-s3c2440/mach-smdk2440.c,添加设备
c、修改arch/arm/plat-s3c24xx/devs.c
添加头文件
#include <linux/dm9000.h>
添加以下代码
d、修改arch/arm/plat-sumsung/include/plat/devs.h 45行附近,添加
e、修改arch/arm/mach-s3c2410/include/mach/map.h文件
/* DM9000 */
#define S3C24XX_PA_DM9000 0x20000300
#define S3C24XX_VA_DM9000 0xE0000000
13、启动画面显示小企鹅的方法
配置内核,下面是必选项
Device Drivers--->
Graphics support --->
<*> Support for frame buffer devices
<*> S3C2410 LCD framebuffer support ,multi support!
Console display driver support --->
<*> Framebuffer Console support
Logo configuration --->
[*] Bootup logo
[*] Standard 224-color Linux logo
14、3.5寸LCD显示的移植
2.6.34内核中已经支持
15、修改uart2为普通串口以及测试程序
修改arch/arm/mach-s3c2440/mach-smdk2440.c中的uart2的配置,修改后如下:
在drivers/serial/samsung.c中添加对uart2控制器的配置,配置为普通串口。
添加头文件:
#include <linux/gpio.h>
#include <mach/regs-gpio.h>
在static int s3c24xx_serial_startup(struct uart_port *port)函数中,添加
16、移植看门狗
修改配置
Device Drivers --->
[*] Watchdog Timer Support --->
<*> S3C2410 Watchdog
最后:make zImage
最后编译出来的zImage就2.1M左右。
烧写内核,启动成功
不过,此时,显示屏显示还有点问题,出现上下两栏。解决方法如下:
修改mach-smdk2440.c中
并且将.lpcsel = ((0xCE6) & ~7) | 1<<4,注释掉
重新编译即可。
至此,2.6.35.4内核移植成功。
分享到:





相关推荐
该文件用于arm-linux内核编译使的配置
$ tar -zxvf linux-2.6.35.4.tar.gz $ cd linux-2.6.35.4 $ ctags --fields=afmikKlnsStz --c-kinds=+pc -R :hot_beverage: 要么 :beer_mug: $ python ../gen_syscalls.py > ../www/syscalls-2.6.35.4.json 网络 ...
里边的文件包含: cloudera-manager-daemons-6.3.1-1466458.el7.x86_64.rpm,1.12GB cloudera-manager-agent-6.3.1-1466458.el7.x86_64.rpm,9.99MB cloudera-manager-server-6.3.1-1466458.el7...scm_schema.sq,35.4MB
里边的文件包含: cloudera-manager-daemons-6.3.1-1466458.el7.x86_64.rpm,1.12GB cloudera-manager-agent-6.3.1-1466458.el7.x86_64.rpm,9.99MB cloudera-manager-server-6.3.1-1466458.el7...scm_schema.sq,35.4MB
35.4 Randomization and linear programming 1123 35.5 The subset-sum problem 1128 VIII Appendix: Mathematical Background Introduction 1143 A Summations 1145 A.1 Summation formulas and properties 1145 A....
2.1 SK 系列真彩触摸屏显示器 5 2.2 ZY106 控制板性能指标 5 3.1 真彩触摸屏 SK 系列尺寸 6 3.2 TP 系列真彩触摸屏显示器外型尺
2.1 SK 系列真彩触摸屏显示器 5 2.2 ZY106 控制板性能指标 5 3.1 真彩触摸屏 SK 系列尺寸 6 3.2 TP 系列真彩触摸屏显示器外型尺
移植话题 33.10. 在Windows下进行Shell编程 34. Bash, 版本 2 和 3 34.1. Bash, 版本2 34.2. Bash, 版本3 35. 后记 35.1. 作者后记 35.2. 关于作者 35.3. 哪里可以取得帮助? 35.4. 制作这本书的工具 ...
33.9. 移植话题 33.10. 在Windows 下进行Shell 编程 34. Bash, 版本 2 和 3 34.1. Bash, 版本2 34.2. Bash, 版本3 35. 后记 35.1. 作者后记 35.2. 关于作者 35.3. 哪里可以取得帮助? 35.4. 制作这本书的工具 35.4.1....
固件_CPU 1515T-2 PN_6ES7515-2TN03-0AB0_V3.0.3
固件_CPU 1515-2 PN_6ES7515-2AN03-0AB0_V3.0.3
35.4Runge-KuttaMethods.................................... 131 IV Selected Higher Subjects 137 36 Categories 139 36.1Introduction............................................. 139 36.2What Categories ...
35.4.3. OutputCapture iv. 35.4.4. TestRestTemplate xv. 36. 开发自动配置和使用条件 i. 36.1. 理解auto-configured beans ii. 36.2. 定位auto-configuration候选者 iii. 36.3. Condition注解 i. 36.3.1. Class...
比较完整的 Ajax基础教程 不过是影版的..共35.4M, 4个包,免费的
比较完整的 Ajax基础教程 不过是影版的..共35.4M, 4个包,免费的
本书全面系统地介绍了Red Hat Linux 6。全书共分为五个部分,包括35章和四个附录。第一部分为Red Hat Linux的介绍和安装;第二部分为服务配置;第三部分为系统管理;第四部分为Linux编程;第五部分为附录。本书内容...
比较完整的 Ajax基础教程 不过是影版的..共35.4M, 4个包,免费给CSDN 的用户.
比较完整的 Ajax基础教程 不过是影版的..共35.4M, 4个包,免费给CSDN 的用户.
Old Interface Between Device Drivers and Kernel: First Part of netif_rx 内核到设备驱动之间的老的接口 Section 10.6. Congestion Management 阻塞管理 Section 10.7. Processing the ...